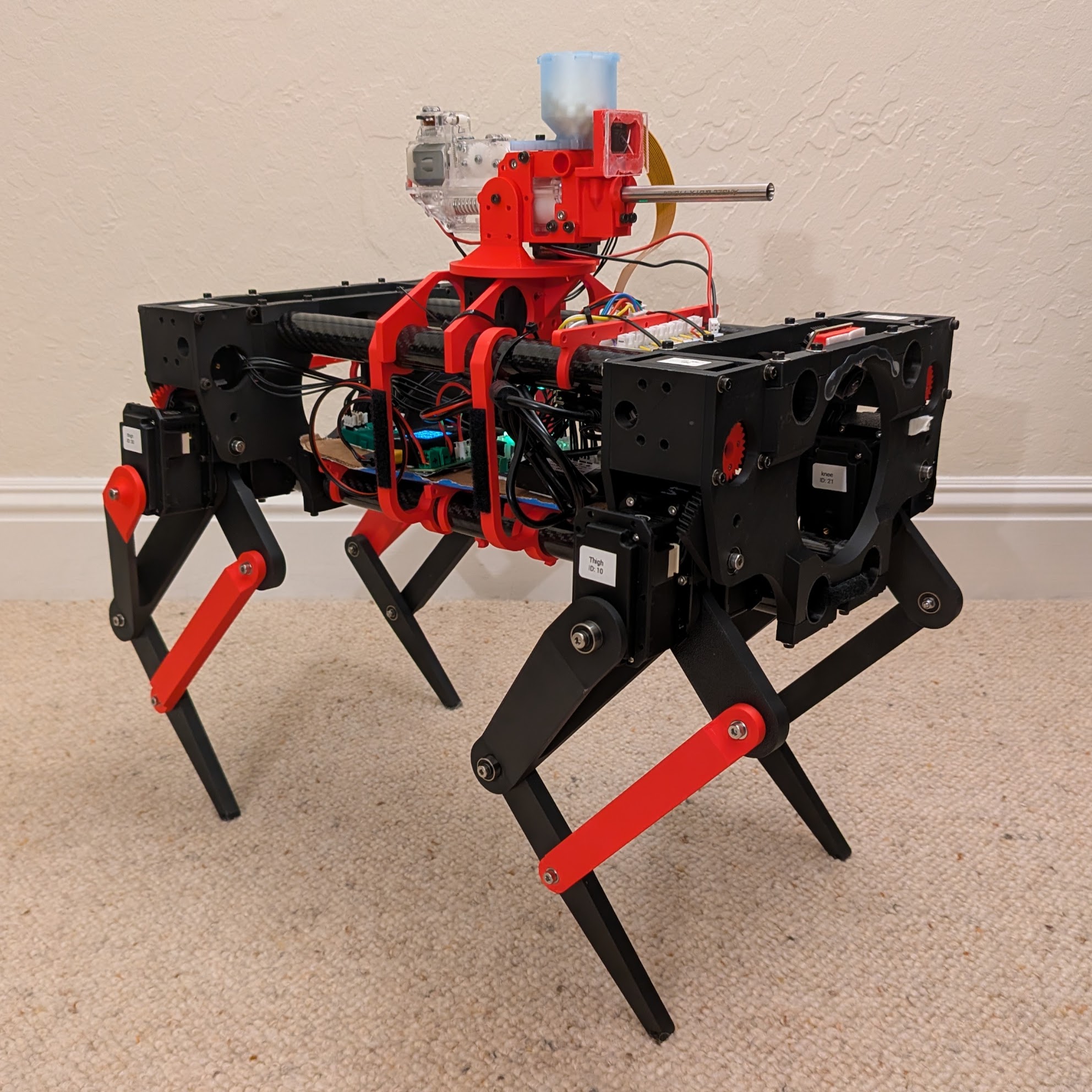
Building a Quadruped Robot (with an airsoft gun)
I designed and built a quadruped robot dog from scratch this summer for a 'Mech Warfare' airsoft battlebots competition.
|
Posted by
on
October 26, 2025 ·
31 mins read

Replacing my Right Hand with AI
Breaking my hand forced me to write all my code with AI for 2 months. I'm never going back.
|
Posted by
on
July 30, 2024 ·
15 mins read
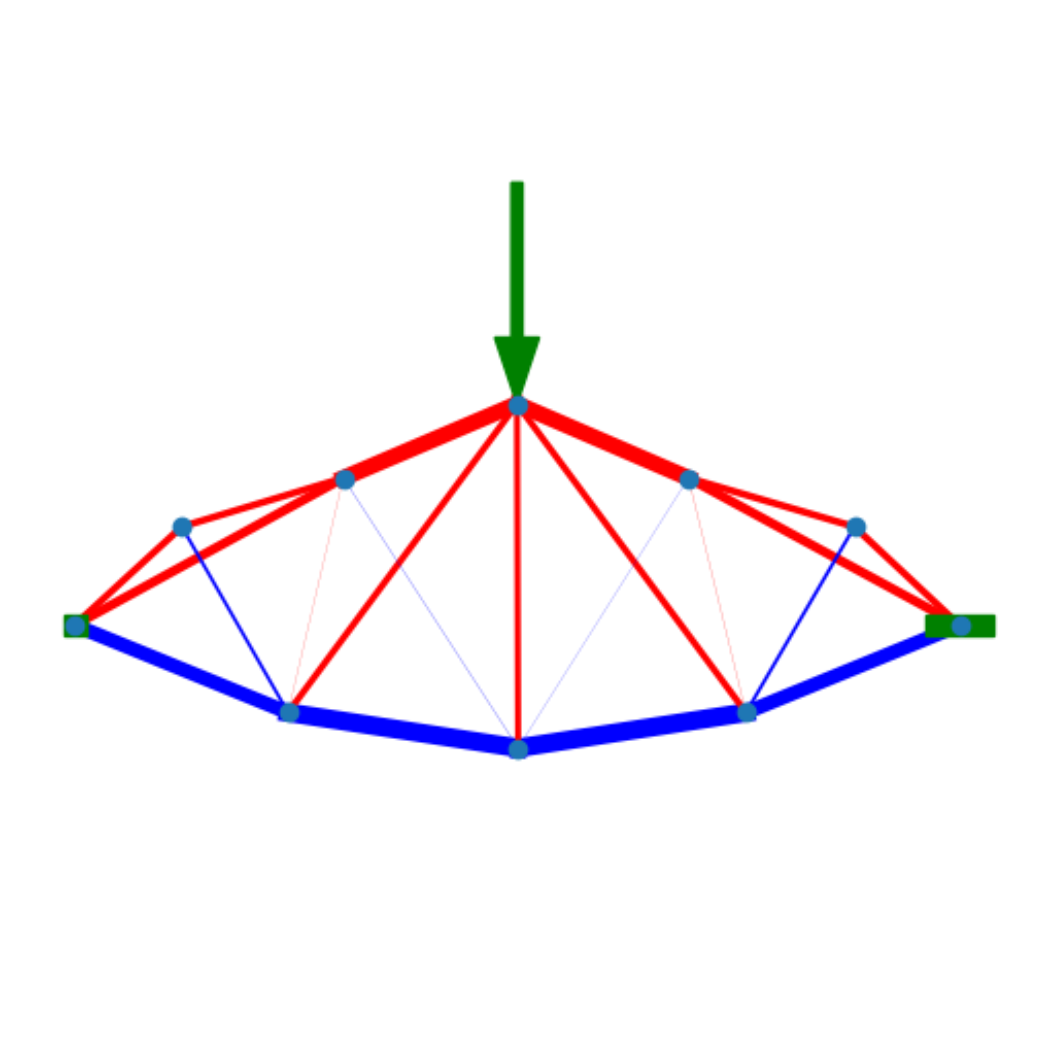
Designing Bridges with Pytorch Autograd
I used automatic differentiation in PyTorch to optimize bridge designs by solving a system of equations. Yes, you can use PyTorch for things besides neural networks :)
|
Posted by
on
January 01, 2024 ·
10 mins read

Lasercutting Projects
A collection of furniture / art projects I worked on during my sabbatical using a Glowforge laser cutter.
|
Posted by
on
December 12, 2023 ·
3 mins read

Automating 1/2 of my typing with generated shortcuts
Compress now has 1,400 stars on github! Shortcuts are autogenerated from analyzing 6 months of my typing...
|
Posted by
on
August 26, 2023 ·
10 mins read

How To Raise Your First Seed Round
Many of my friends and employees at Cobalt have asked me what fundraising is like and what the first steps are to start a company. I’ve written this post to help demystify some of the process based on my experience raising 5 rounds over my career (Seed through Series C with Cobalt Robotics and Seed for Posmetrics (YC W13)). I...
|
Posted by
on
November 14, 2022 ·
11 mins read

Refinance your Tech Debt
Credit Card Tech Debt vs Mortgage Tech Debt People online talk about “tech debt” as a universal evil that heroic engineers must fight against Product to prevent, but just like real debt, the story is more complicated. Tech Debt Technical Debt is the idea of reducing work now to finish a project sooner, in a way that will create more...
|
Posted by
on
December 07, 2021 ·
9 mins read

Podcast: Taking Elevators, Robot Body Language, and Advice for Startups
I was recently featured on the Sense Think Act podcast with host Audrow Nash.
|
Posted by
on
October 25, 2021 ·
1 min read
Premortems Will Keep Your Code Alive
Premortems and Postmortems Two crucial tools for writing code when the stakes are high, like managing our fleet of over 100 robots at Cobalt Robotics. This is part 2 of a 2 part series on High Stakes Code. See Part 1. Premortems Premortems are remarkably quick, and have saved my team from making bad mistakes many times. What’s a premortem?...
|
Posted by
on
October 12, 2021 ·
7 mins read

Writing High Stakes Code (At A Startup)
Thoughts on how to write code when the stakes are high or human safety is involved, but you don’t have the budget or timelines of NASA. Most of these are from safely building a fleet of over 100 robots at Cobalt, advising startups who programmatically move money/stocks, or my time at SpaceX. I’ll try to make this general for writing...
|
Posted by
on
September 21, 2021 ·
10 mins read
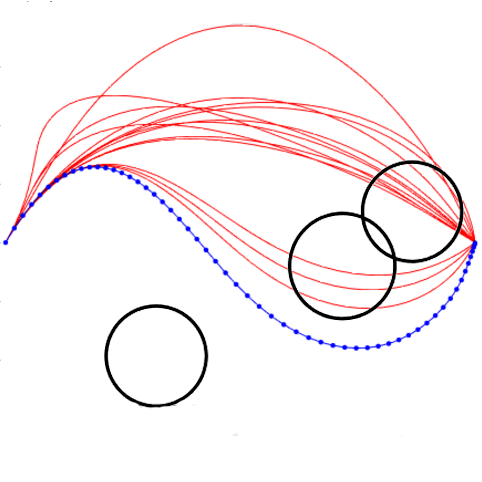
Path Planning with Trajectory Libraries
Traditional path planning techniques such as RRT or A* do not do a good job expressing physical constraints like maximum acceleration or turning radius. Even if they are smoothed to find the shortest path, it might not be the quickest path.
|
Posted by
on
December 12, 2015 ·
2 mins read
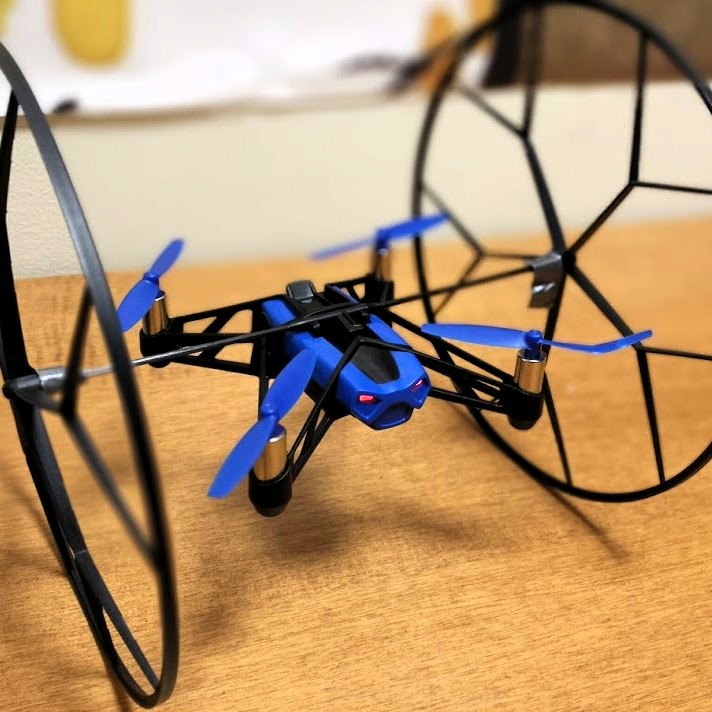
Adaptive Control for Damaged Drones
Modern control techniques like LQR require an accurate model of the system they are controlling, but if that system changes changes you’re out of luck. I designed an adaptive controller to maintain control of a drone even if one of its propellers breaks. The algorithm compares the drone’s expected behavior and observed behavior to learn thrust offsets and correct them....
|
Posted by
on
December 06, 2015 ·
1 min read
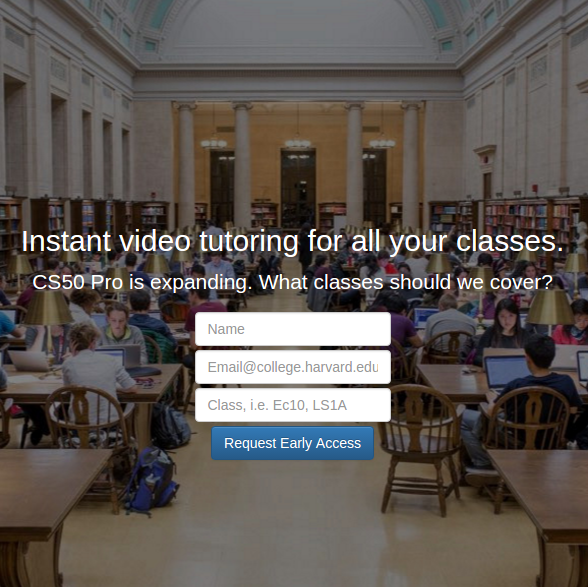
On Demand Video Tutoring
Alex Kaufman and I thought that arranging traditional tutoring was too slow to help students when they really need it – If you’re up late finishing a problem set or studying for an exam the next day, there’s no way to talk to a tutor in the moment. We built cs50pro as a way for students to instantly connect to...
|
Posted by
on
October 01, 2015 ·
1 min read

SpaceX Falcon 9
This summer I worked at SpaceX on the Flight Software Test Team. Ensuring software correctness is a challenging problem on a project as complex as a rocket, where so much performance depends directly on the hardware. Our team creates automated tests that leverage both simulations and actual flight hardware to verify that new code is flight worthy, and that no...
|
Posted by
on
September 01, 2015 ·
1 min read
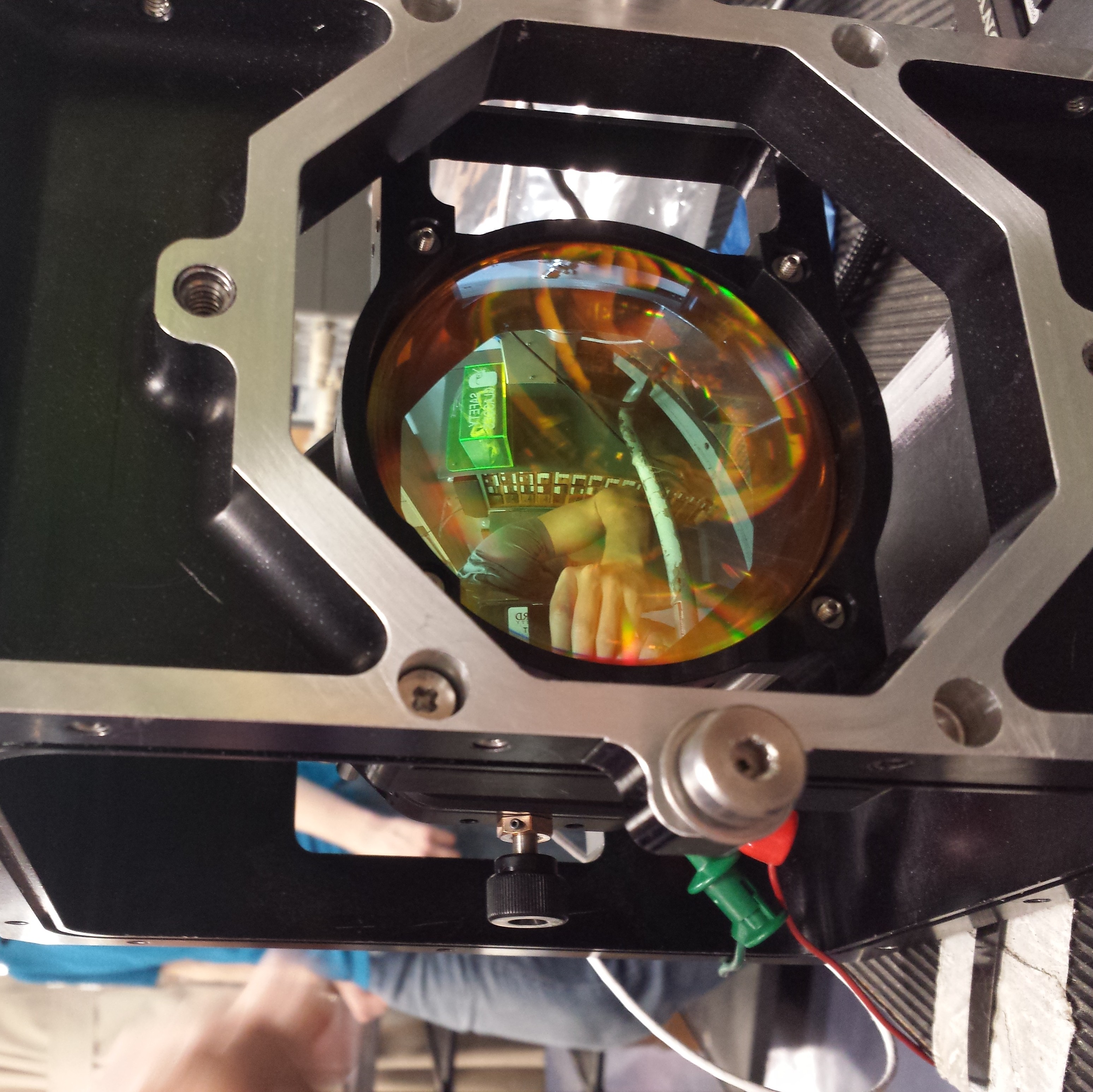
Spectroscopy Instrument
For a semester long design project, I worked on parts-per-trillion precision HCl detector that will fly on the Harvard / NASA “StratoCruiser”, a long endurance balloon that can move around the stratosphere to investigate Ozone loss. In order to attain our required precision with strict weight and power constraints, we used ICOS laser spectroscopy, which measures laser absorption through a...
|
Posted by
on
May 01, 2015 ·
1 min read

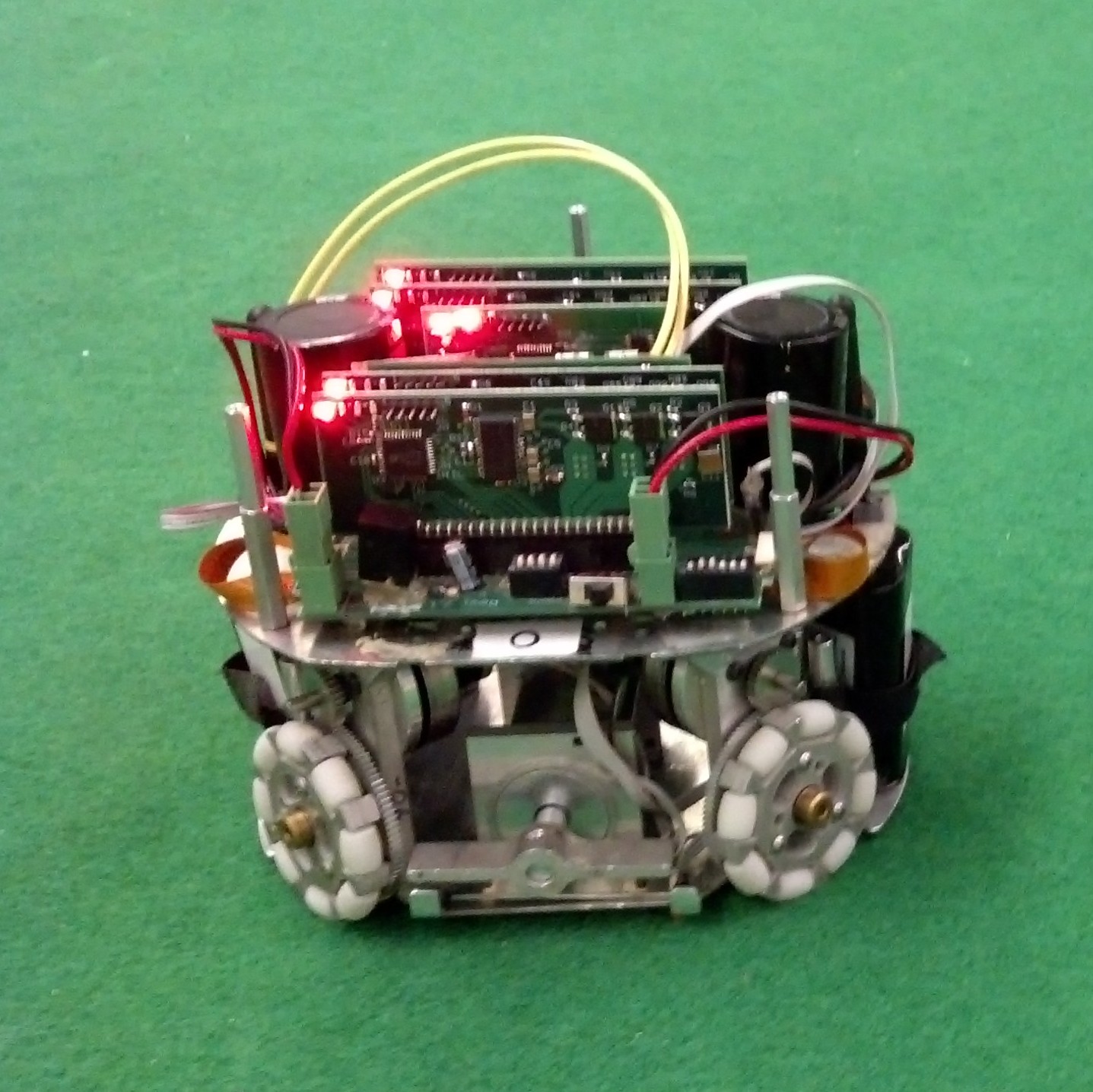
Robot Circuit Boards
I spent much of senior year leading a redesign of Robot Soccer Team’s electronics for increased reliability, flexibility, and backwards communication. The robots have two way communication with a central computer over Xbee Radios, 3-phase brushless motor controllers that pull up to 5 Amps of current each, and capacitor charger that lets us driver a solenoid with 250 Volts to...
|
Posted by
on
April 30, 2015 ·
1 min read

IoT-enabled Bike Sharing
For our CS244r final project we built a smart bike lock and an iPhone app that allowed users to rent out their own bike, or to rent other people’s bikes. Our server generated Time-expiring One Time Passwords (TOTP) that were passed to the phone, and then to the lock over BLE if a user has permission to rent the bike....
|
Posted by
on
April 01, 2015 ·
1 min read
Interests
As an engineer and an entrepreneur, I am constantly looking for problems to solve or processes to make more efficient. In particular, I am passionate about automating or transforming the biggest bottleneck in a company or system. Automating expensive, labor intensive tasks doesn’t just save money, but lets you do 10x more, changing the fundamental constraints of the system.
|
Posted by
on
January 05, 2015 ·
1 min read

Work Experience
I was the co-founder and CTO of Cobalt Robotics. Along with my cofounder Travis Deyle, we build AI-enabled, friendly, security guard robots for offices and warehouses. We’re Series C, raised from top investors including Sequoia, and have deployed over 100 robots to customers around the world. Before that, I worked on SpaceX’s Flight Software Team, testing an entirely new fuel...
|
Posted by
on
January 04, 2015 ·
1 min read

Education
I graduated from Harvard University in 2015 with Master’s and Bachelor’s degrees Cum Laude in Electrical Engineering. My goal was to become a ‘Renaissance Engineer,’ with a broad range of knowledge across several disciplines so that I could approach problems from a holistic perspective. The issues we face today are too complex to be solved within a single specialty, and...
|
Posted by
on
January 03, 2015 ·
1 min read

Hobbies
On days off, I enjoy mountain biking, sailing, skiing, and hiking. When I don’t have quite as much time, I read science fiction, play board games (and write AIs to play board games), and play tennis.
|
Posted by
on
January 02, 2015 ·
1 min read

Posted by
on
January 01, 2015 ·
1 min read
Robot Soccer AI
Working on the MIT / Harvard Robocup Soccer team was a fun and fast paced engineering experience. We compete at a world championship tournament every summer, and spend the school year working on new mechanical designs and new behavior algorithms to out-maneuver and outsmart the other teams. I redesigned our Artificial Intelligence and planning software based on nested Finite State...
|
Posted by
on
December 13, 2014 ·
1 min read
High Performance C++
Using C++ I created a variety of physics simulations for a graduate class on Systems Development for Scientific Computing. I implemented an abstract graph class to represent my data, and applied it to several different problems including mass spring simulations, shallow water models, and geometric collision detection.
|
Posted by
on
December 12, 2014 ·
1 min read
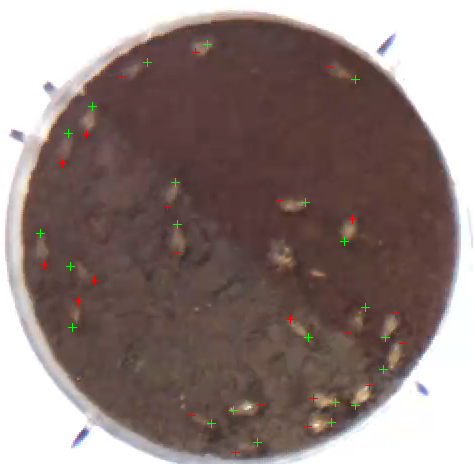
Termite Tracking Computer Vision
It took 60 hours of tedious labor annotating videos of termites every time the Self-organizing Systems Research Group at Harvard ran an experiment. Because of the experimental setup, off-the-shelf tracking software didn’t work. By using standard image processing techniques, a model predicting each termite’s motion, and small amounts of human input, I was able to largely automate the video processing,...
|
Posted by
on
December 12, 2014 ·
1 min read
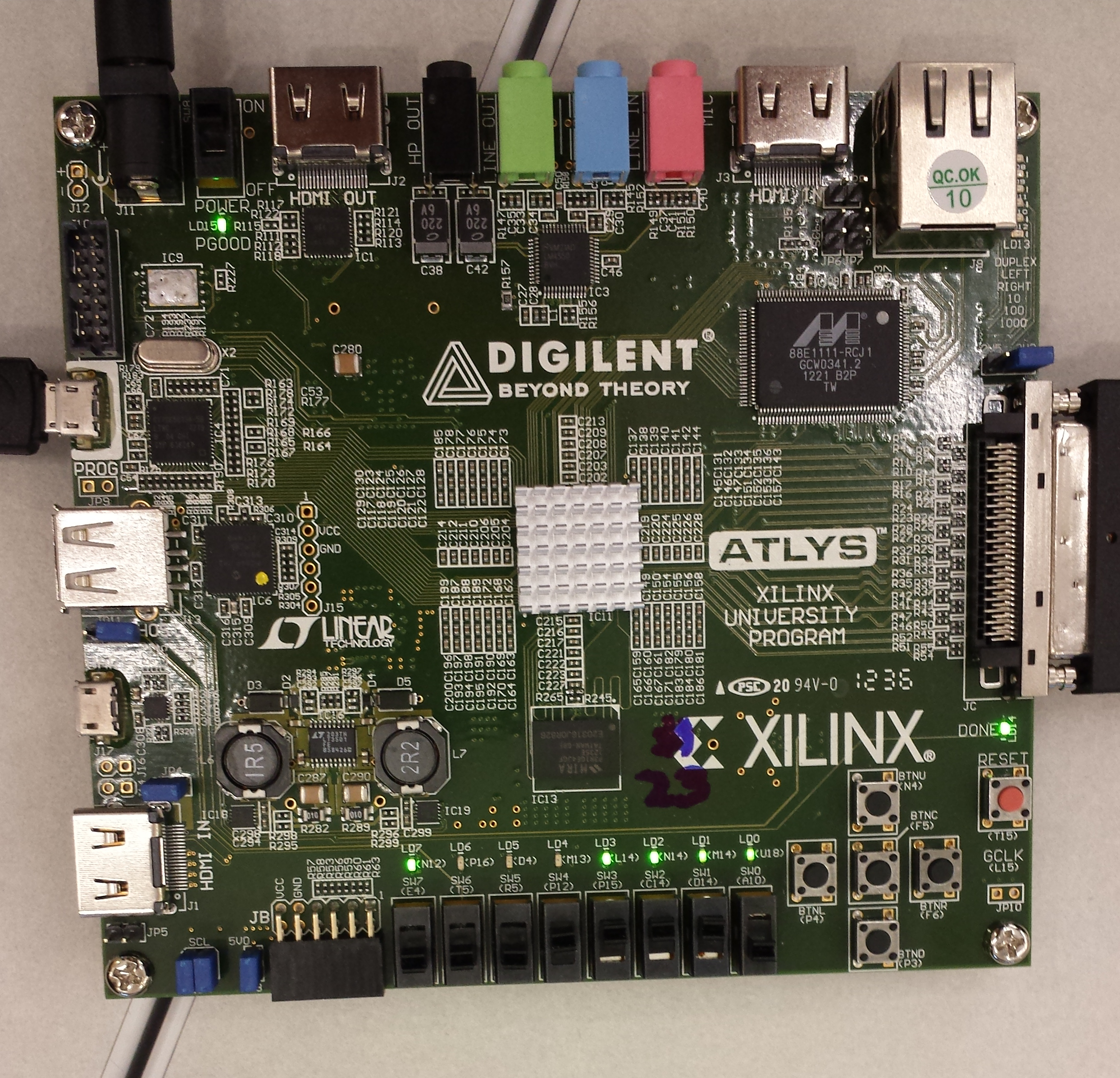
CPU on FPGA
As part of a class on computing hardware, I designed and implemented a multicycle MIPS RISC architecture CPU on a Xilinx FPGA using Verilog. I started by creating the Arithmetic and Logic Unit (ALU) that is the heart of any CPU using combinational logic. I then created the datapath and control structure that loads instructions from memory, decodes them, and...
|
Posted by
on
November 05, 2014 ·
1 min read
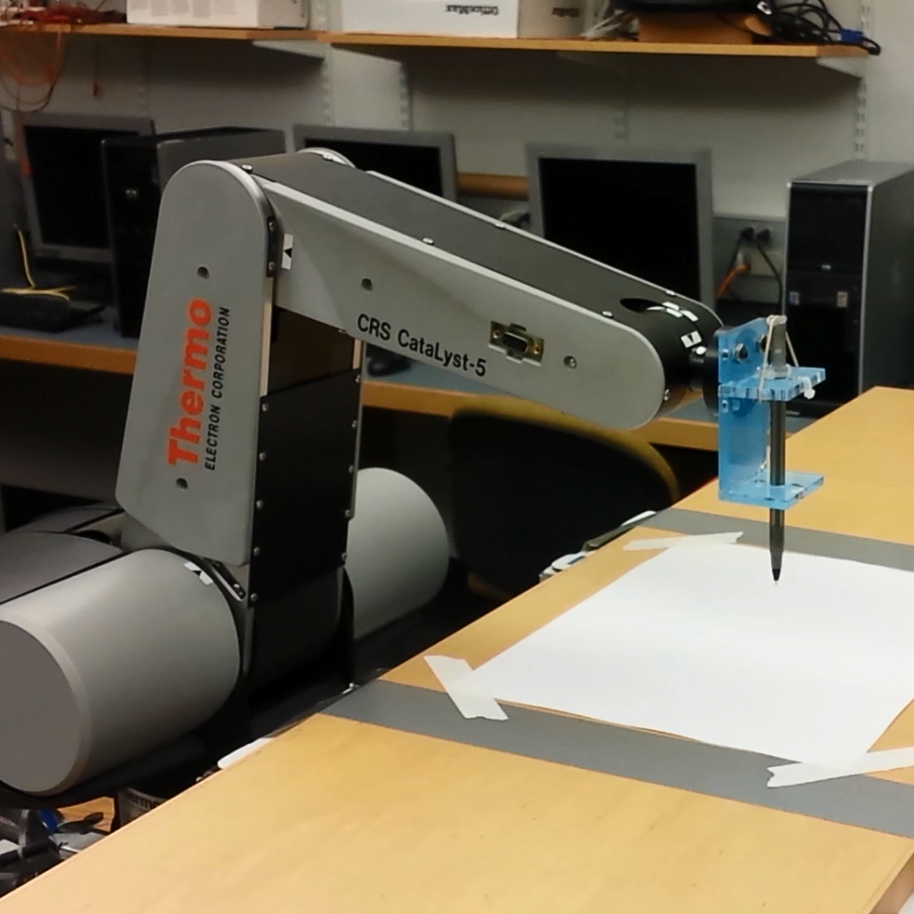
Robotic Drawing
My final project for Advanced Robotics was to draw pictures from an input photo using a Catalyst-5 robot arm. Standard edge detection algorithms were just the beginning of my processing pipeline, the real challenge was to connect these edgelets into continuous pencil strokes for the arm to draw in the most efficient manner.
|
Posted by
on
November 05, 2014 ·
1 min read

Drones with RFID Sensors
RFID tags are the perfect platform for sensors: cheap, small, and with an infinite lifetime because they harvest energy from RF signals when communicating. Their only problem is a very limited communication range. In this project with Travis Deyle and Jennifer Wang, we used mobile robots to distribute and read sensorized RFID tags.
|
Posted by
on
September 01, 2014 ·
1 min read
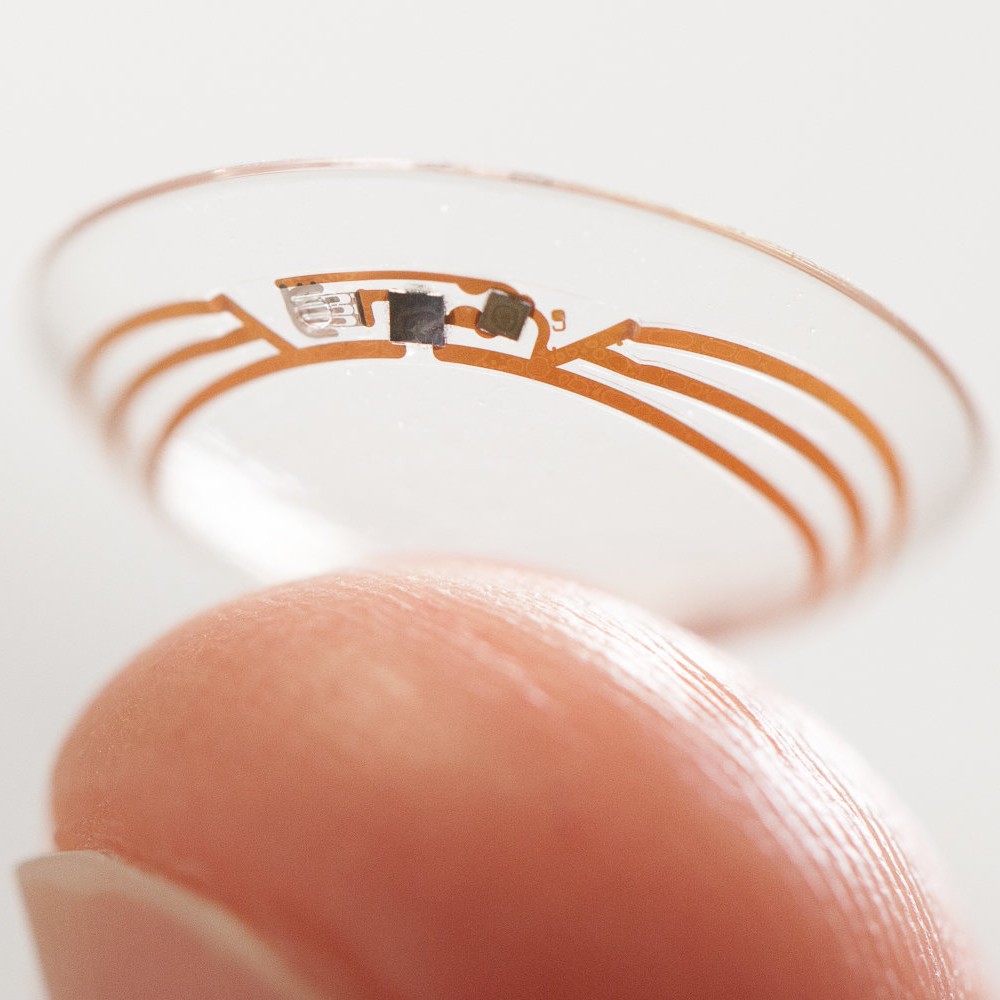
Google[x] Smart Contact Lens
This summer I’m working at Google[x] in the Smart Contact Lens group. The lens is designed measure glucose levels in tears and transmit information to your other devices. This will allow people with diabetes to continuously monitor their blood sugar levels throughout the day without drawing any blood. We are also developing vision correcting lenses that dynamically change their focus...
|
Posted by
on
September 01, 2014 ·
1 min read
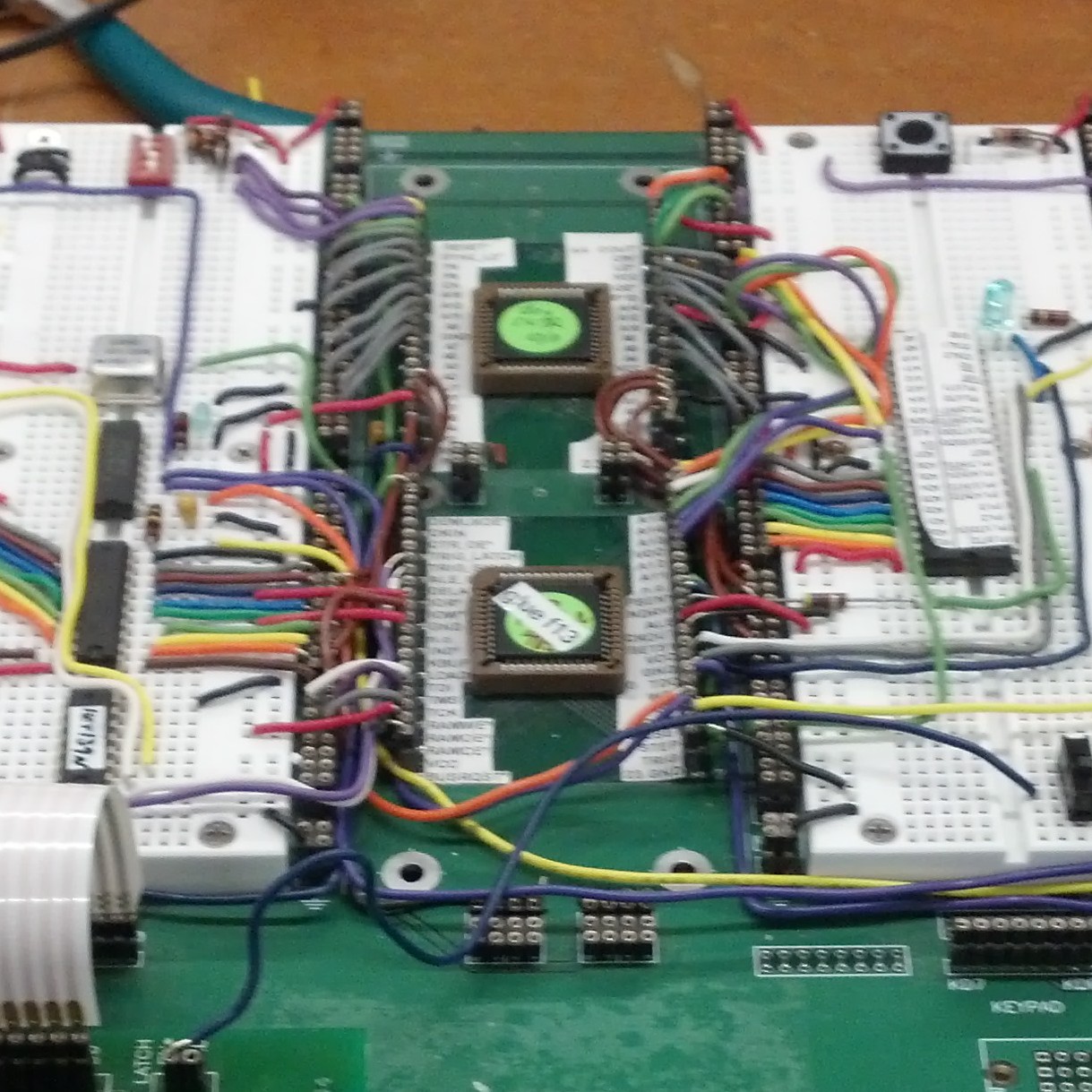
Microcontroller
As part of my Laboratory Electronics class, I built a microcontroller from scratch in order to see how computers work at the most basic level. The processor is connected to 32K of RAM as well as an ADC and DAC through a shared data bus and address bus. Because I implemented the logic to control the buses myself I now...
|
Posted by
on
May 01, 2014 ·
1 min read

Tech in the World
Over January 2014 I traveled to Tanzania as part of the Tech in the World program to expose more CS students to international development. While there, we designed and built a system for the Ifakara Health Institute that would allow them to send Verbal Autopsy reports to and from physicians electronically, replacing a paper based system that could take over...
|
Posted by
on
February 01, 2014 ·
1 min read
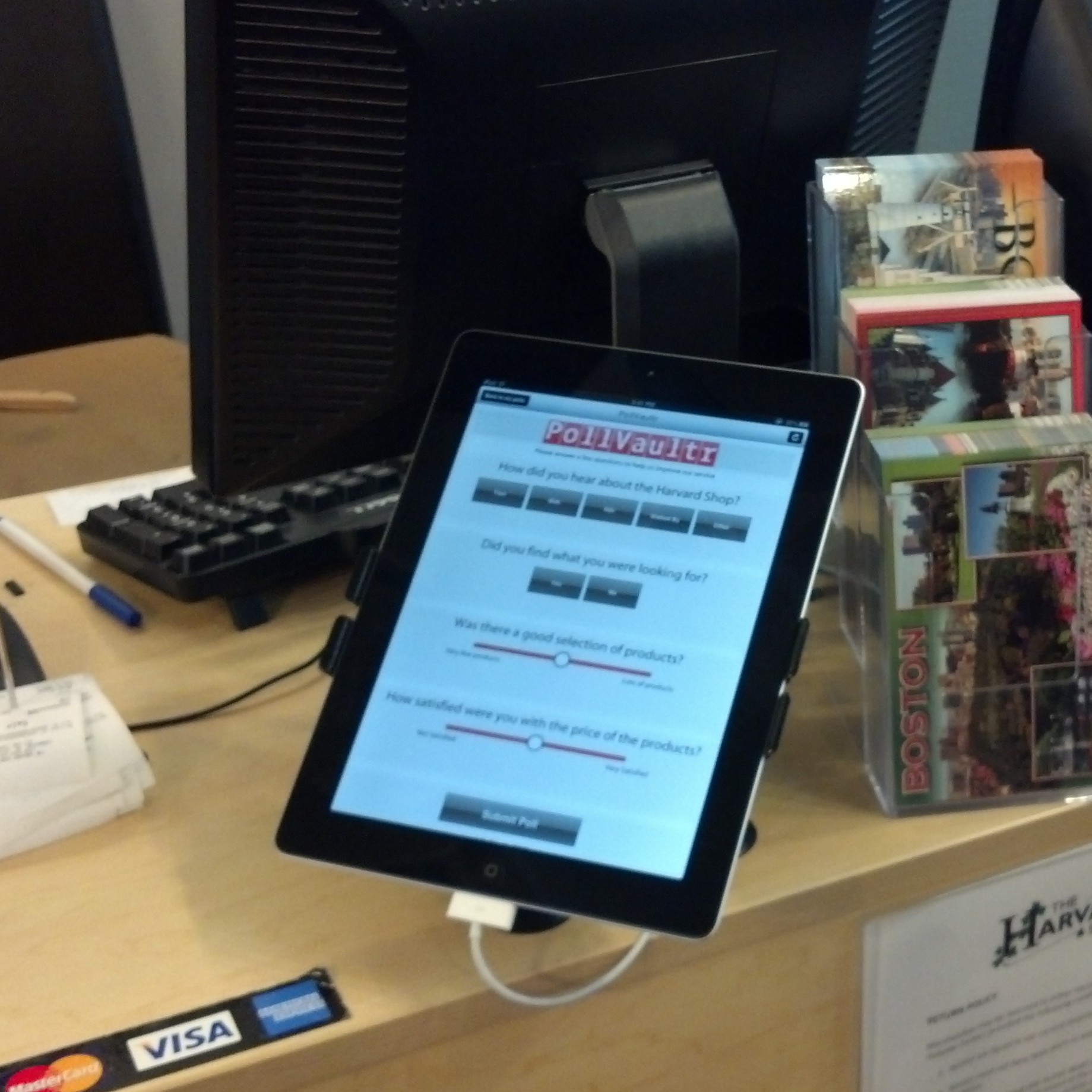
Posmetrics (originally PollVaultr)
Posmetrics (formerly PollVaultr) was my first startup! While at Harvard, Merrill Lutsky and I both realized that everywhere we went, businesses wanted us to fill out customer feedback surveys, but we never did because filling out surveys later and online was such a hassle. The solution, we realized, was to put the survey right in front of the customer, before...
|
Posted by
on
July 30, 2013 ·
1 min read
2D Robot Simulation
My goal with this program was to create an environment where I could accurately simulate a robotic system without any hardware. The most challenging part of robotics is overcoming the physical imperfections, noise, and unpredictability in the environment. I tried to mimic this as closely as possible in the simulation by only allowing the robot to perceive its environment through...
|
Posted by
on
June 01, 2013 ·
1 min read

Shock Absorber
As the final project for my Mechanical Systems class, we had to design a shock absorber that would minimize the impact force of a 10lb weight dropped from 2 meters, as well as model the system as springs and dampers to predict the maximum force during the impact. In order to achieve the lowest maximum force, we focused on giving...
|
Posted by
on
December 20, 2012 ·
1 min read
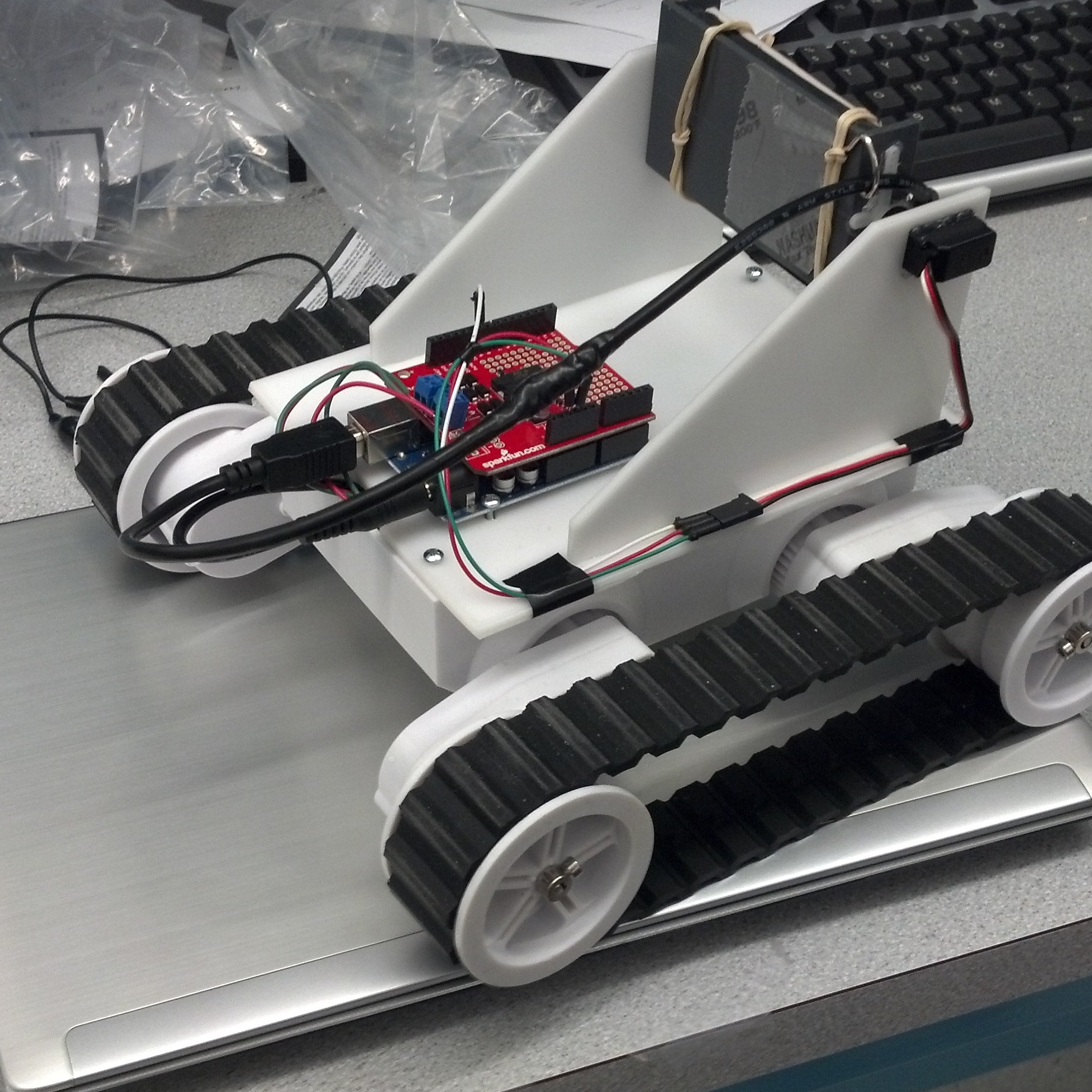
Cellphone Based Robot
For my final project in Introduction to Electrical Engineering, my group created a robot that used an android handset as its processor. The robot was able to receive instructions through the cellphone’s data service and also stream back video from the phone’s camera. I chose to use a cellphone as the base of the robot over the more conventional choices...
|
Posted by
on
May 20, 2012 ·
1 min read
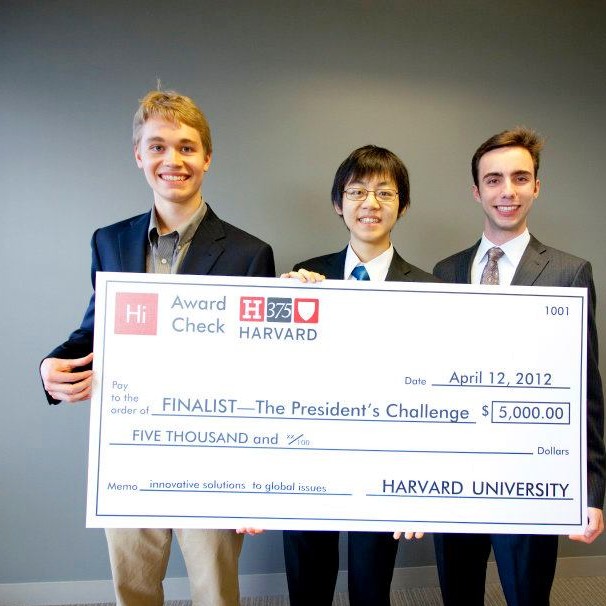
President's Challenge
Aaron Cheng, Rob Gunzenhauser and I entered the 2012 Presidents Challenge at Harvard University and were chosen as 1 of the 10 finalist teams from over 170 applicants across all of Harvard’s undergraduate and graduate schools. Our proposal was to process sewage in slums across the world in an economically sustainable way by using biodigesters to convert it into energy...
|
Posted by
on
May 01, 2012 ·
1 min read
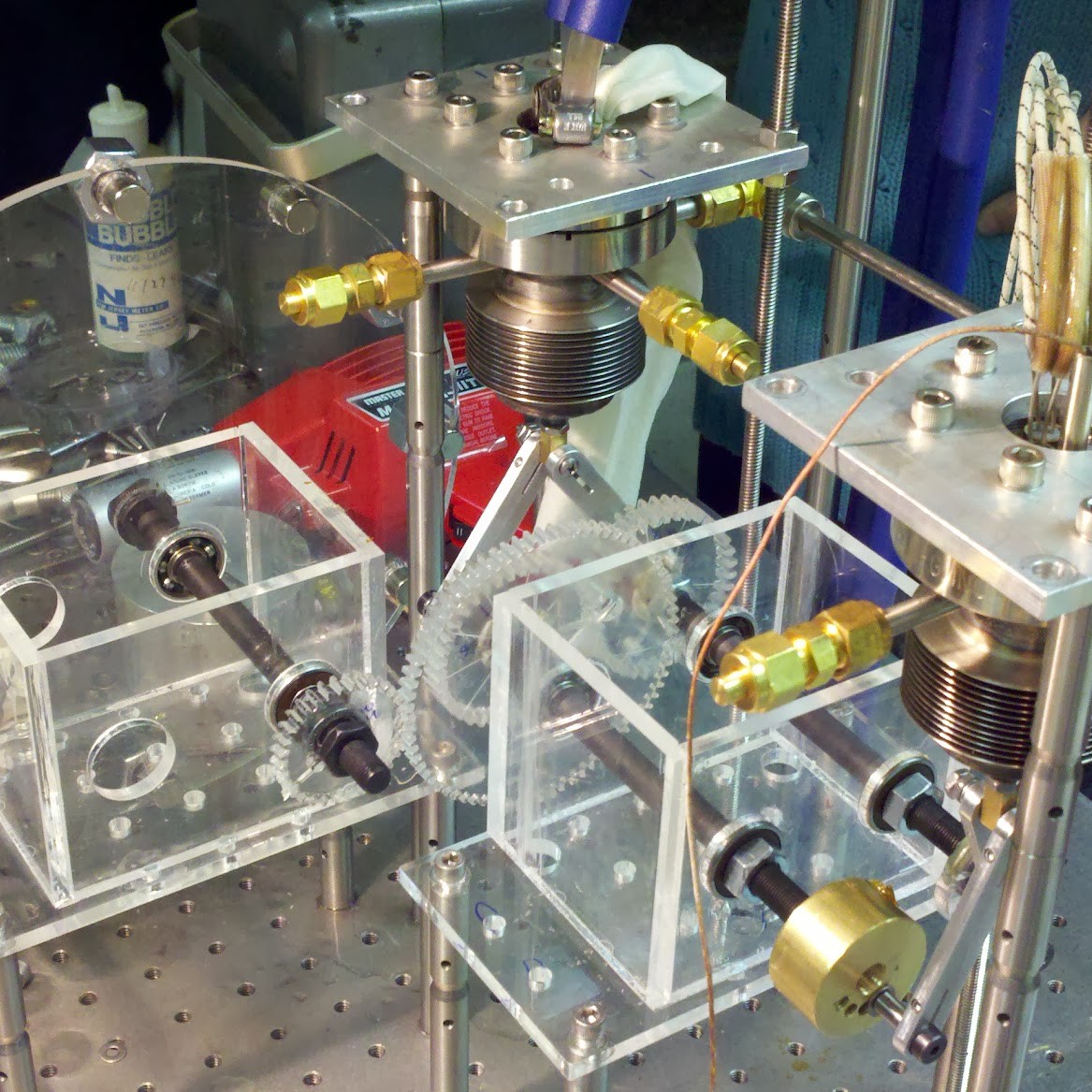
Stirling Engine
My applied physics freshman seminar focused on designing, modeling, and building a stirling engine. We learned the thermodynamics and operating principles behind the engine, and used them to model the theoretical efficiency of the engine based on a number of design parameters in Mathematica. Using Mathematica, we found the parameters to maximize efficiency and then constructed the engine. Our engine...
|
Posted by
on
December 10, 2011 ·
1 min read
Erosion Simulation
I wrote this simulation while working with a professor at Harvard University doing research in computational geomorphology during my freshman year.
|
Posted by
on
November 02, 2011 ·
1 min read
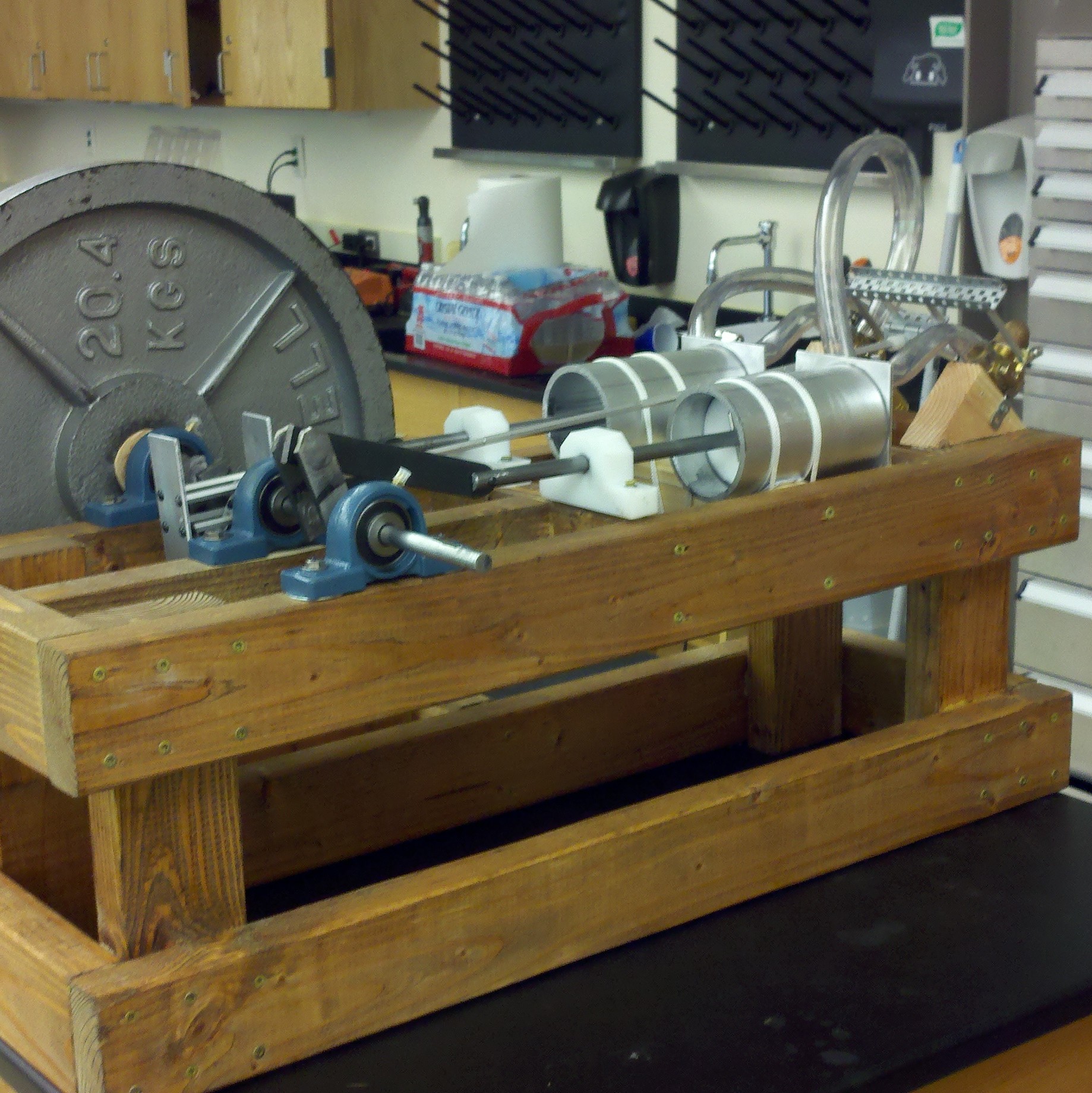
Steam Engine
For my high school senior project, I decided to build a steam engine. With only a drill press, a dremel, and a hacksaw, I built a crankshaft connecting a 45 lb flywheel to two pistons. I hand-sanded piston heads out of HDPE so that they were airtight with the aluminum piping I used to make my cylinders, and created a...
|
Posted by
on
May 10, 2011 ·
1 min read
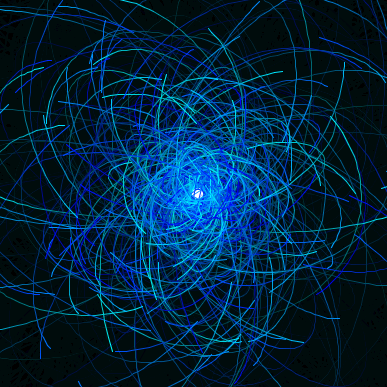
Unreal Gravity
This program simulates how objects would orbit a central gravity well if the relationship between distance and force in Newton’s law of gravity is changed. Exponents other than -2 produce strange, but still stable orbits.
|
Posted by
on
May 01, 2011 ·
1 min read
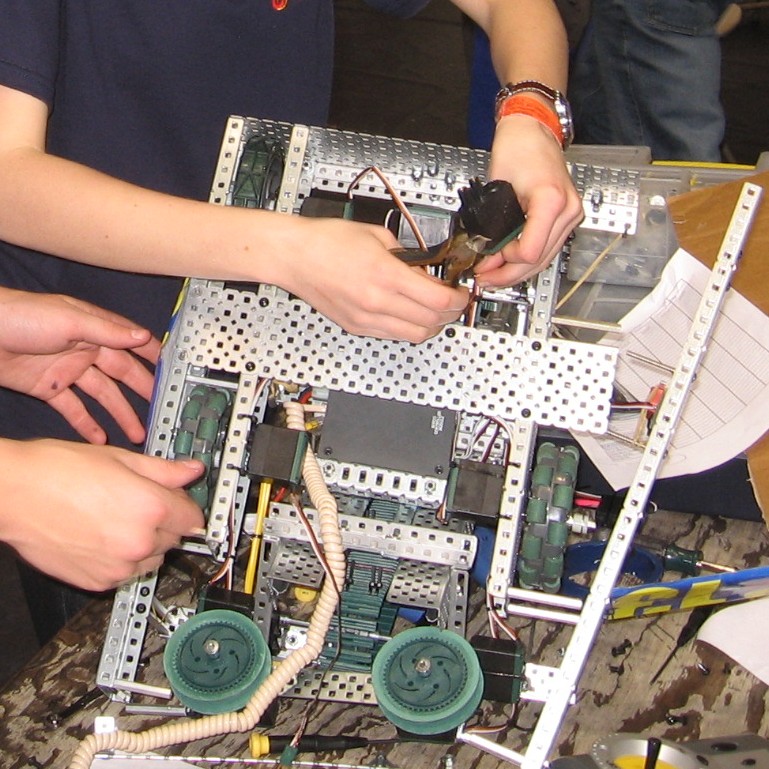
Vex and First Robotics
During high school, I was the lead mechanical engineer on my school’s robotics team. We competed in FIRST robotics and then the Vex Robotics Challenge, making it to the World Championships four years in a row.
|
Posted by
on
May 01, 2011 ·
1 min read
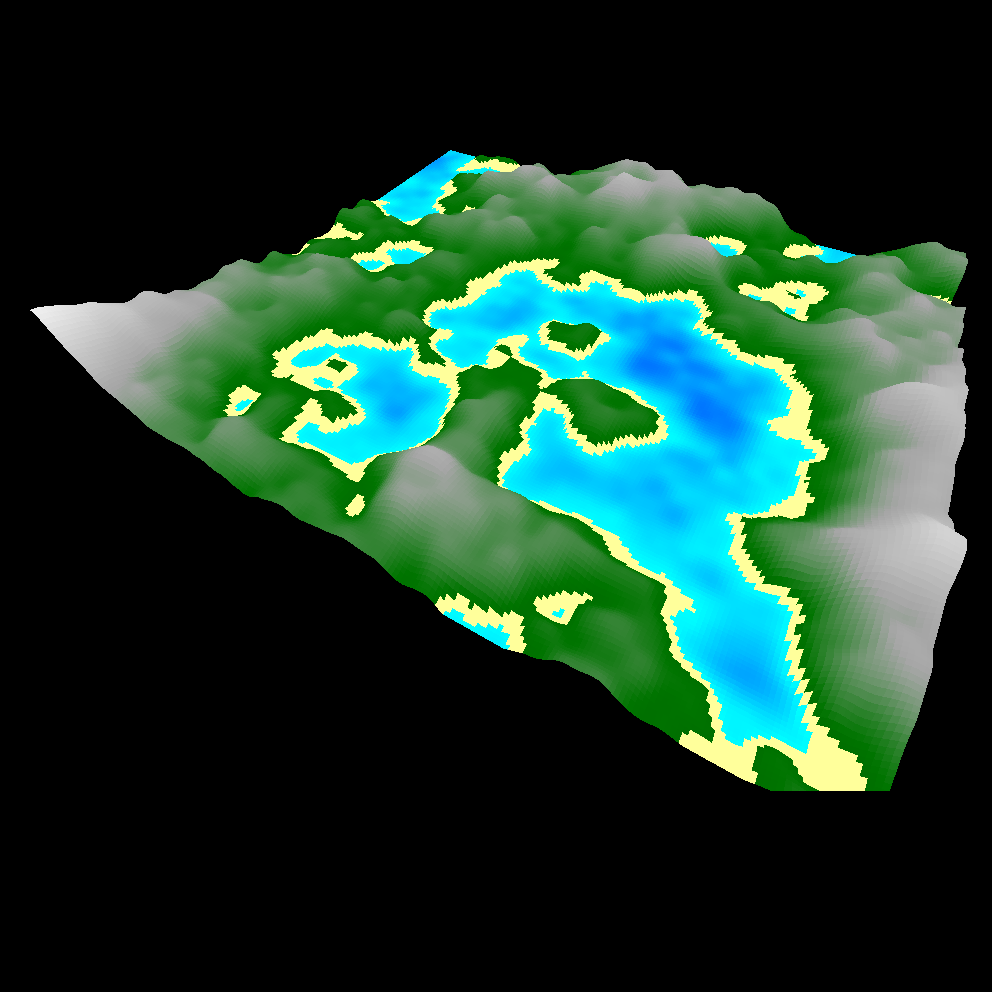
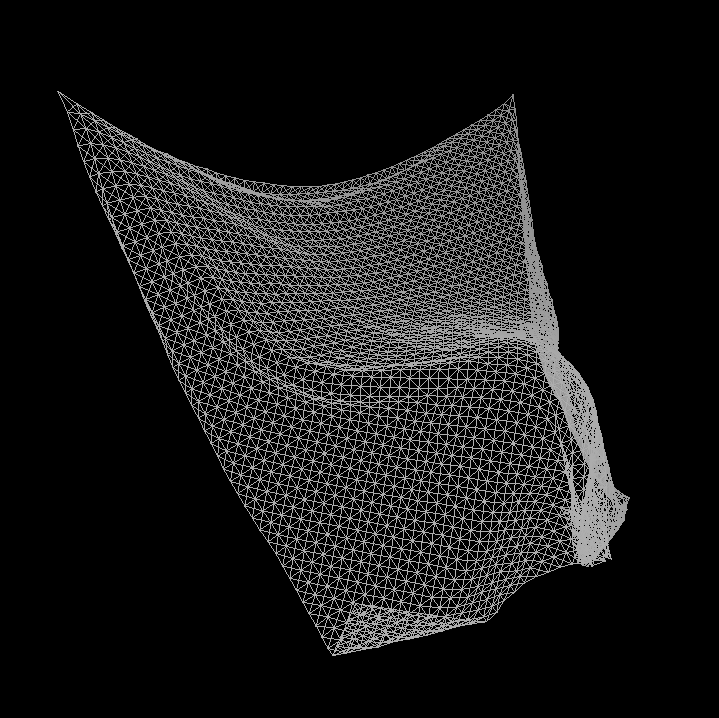
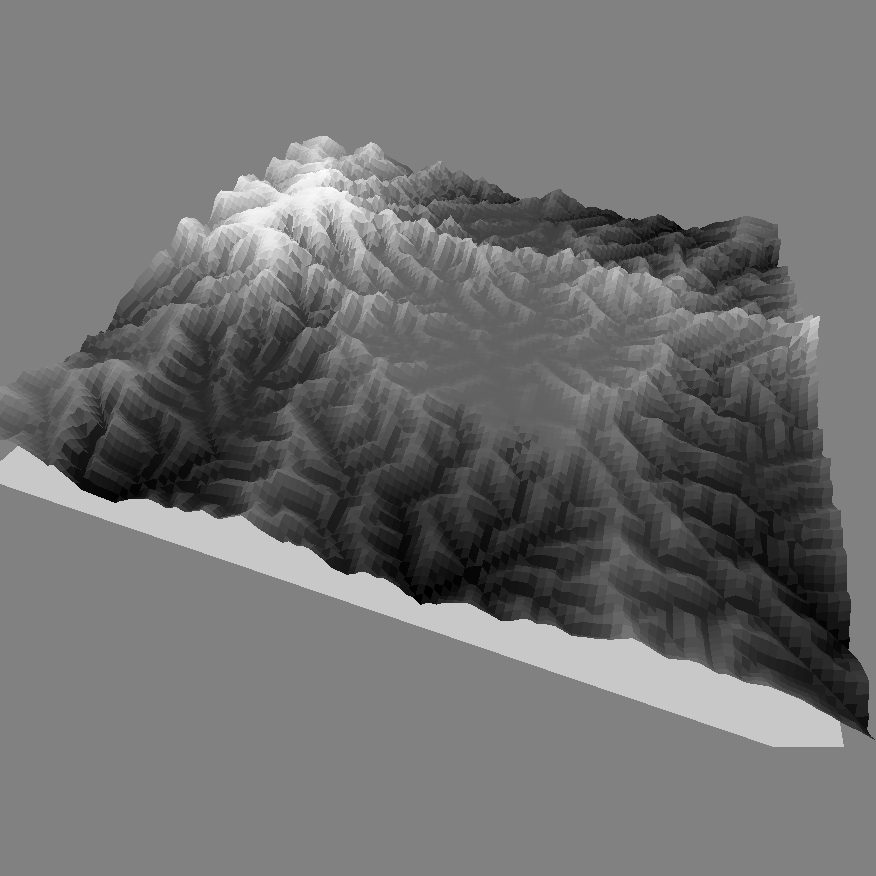
Landscape Generation
This program uses Perlin Noise to generate random landscapes and color them realistically. A number of parameters allow the user to tailor the scale and level of detail of the generated landscapes, and the program can produce surprisingly realistic results.
|
Posted by
on
March 01, 2011 ·
1 min read
Cellular Automata
This program simulates Conway’s Game of Life, a well known rule for 2 dimensional Cellular Automata. Cellular Automata can produce incredibly complex patterns from extremely simple rules and interactions, and noted scientist Stephen Wolfram suggests that they can be used to model reality more effectively than mathematical equations in certain situations. This program is multithreaded to take full advantage of...
|
Posted by
on
January 01, 2011 ·
1 min read